



設(shè)計仿真 | Adams 與 Matlab 通過 FMI 聯(lián)合仿真 
02聯(lián) 合 仿 真Adams & Matlab基于FMI協(xié)議接口的聯(lián)合仿真與二者傳統(tǒng)的方式類似,需要在多體模型中將輸入輸出信號以狀態(tài)變量的方式定義好并與模型建立關(guān)聯(lián),控制模型需要將多體模型融合,將輸入與輸出信號按照規(guī)定的邏輯關(guān)系進行關(guān)聯(lián)。
2710
海克斯康設(shè)計與仿真 ??? 1年前
Adams與Matlab聯(lián)合仿真示例 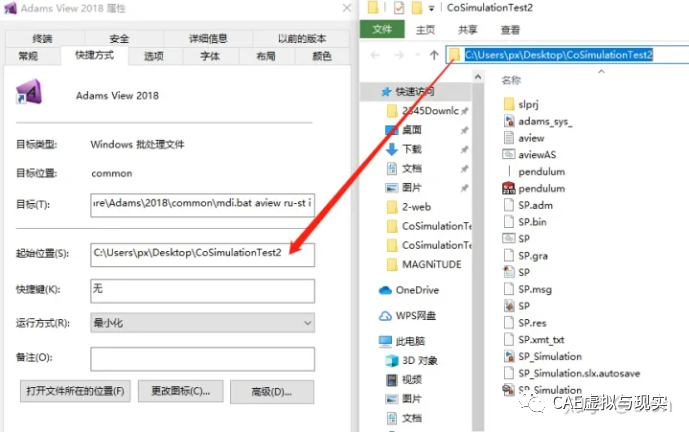
選擇Adams Controls插件,導出機械系統(tǒng),如圖所示。 四、Matlab搭建仿真系統(tǒng) 打開Matlab,運行Pendulum_a指令(就是Adams導出機械系統(tǒng)的文件名),如圖所示。
3580 3 2
仿真客 ??? 3年前
設(shè)計仿真 | Adams導入Matlab生成的FMU 
Adams總 結(jié)Matlab或其它一維軟件生成的FMU導入Adams中進行聯(lián)合仿真應(yīng)用,在實際工程中有豐富的應(yīng)用場景,而且這種方式,由于以Adams為主展開仿真,因此,對于很多基于多體的仿真形式得以方便地實現(xiàn),比如聯(lián)合仿真下的變拓撲分析,雖然我們前面有文章描述將Adams模型導入Matlab中進行變拓撲分析的方法,但是,仍舊還是直接在Adams中實現(xiàn)更為方便,也更適合更廣泛的用戶全體的需求
2743
海克斯康設(shè)計與仿真 ??? 1年前
基于adams car matlab的聯(lián)合仿真 

adams 2019與matlab 2014聯(lián)合仿真的接口設(shè)置,在simulink中仿真了常值輸入、正弦輸入的對比結(jié)果。
239 1
君子嵐 ??? 5年前
Adams與matlab的聯(lián)合仿真——Car-Simulink篇 
本課程主要為Adams與Matlab聯(lián)合仿真的第二部分,Car與Simulink的聯(lián)合仿真,主要講述了二者聯(lián)合仿真的方法;大家有什么問題的話可以下面評論或者私信我,微信有提醒。非常感謝大家的支持,新的視頻終于見面了。。另外大家有什么想學習的視頻可以評論留言,以便出后續(xù)視頻。
91 10
李亮 ??? 6年前
2013版ADAMS與Matlab聯(lián)合仿真(絕對正確版
2013版ADAMS與Matlab聯(lián)合仿真(絕對正確版).pdf
2081 1
高奎 ??? 4年前
Adams&Workbench&Matlab四連桿機構(gòu)運動學分析 
圖7 Adams仿真結(jié)果 圖8 Workbench仿真結(jié)果 圖9 Matlab仿真結(jié)果 文章來源:本碩博工程師俱樂部
2810
擺渡人張 ??? 2年前
matlab與Adams的機械臂運動學驗證 
聯(lián)合Ansys殼單元約束模態(tài)分析 五、ADAMS 基于Adams的行星錐齒輪減速器動力學分析 Adams中鋼絲繩建模方法分析 庫卡六軸機器人動力學分析 基于Adams的機器手搬運仿真 基于Adams的Delta機器人運動學分析
2975 1 1
木火柴 ??? 4年前
設(shè)計仿真 | Adams_Controls變拓撲分析 
但是,用戶經(jīng)常苦惱于單純的Adams仿真,他們可以使用腳本輕松地實現(xiàn)絕大部分的變拓撲分析,但是將Adams模型導入Matlab后,由于腳本不再能用,仿真以Matlab為主導進行,無法實現(xiàn)對Adams模型在仿真過程中的調(diào)整。本文針對該問題進行處理。
2513 1
海克斯康設(shè)計與仿真 ??? 1年前
基于ADAMS的助老起升裝置的運動學仿真分析 
由于三維模型結(jié)構(gòu)較為復雜,需對 28 個零件模 型進行布爾操作,以便優(yōu)化結(jié)構(gòu)組成,如將主體鋁合 金框架合為一組,其余對稱零件分別合為一組,一共 分為 6 組零件。 2.2 連接設(shè)置 由于此產(chǎn)品需進行運動分析,故設(shè)置完模型后需 進行運動副連接設(shè)置,根據(jù) ADAMS 軟件運動庫內(nèi) 容,裝配體主要由旋轉(zhuǎn)副、移動副、固定副組成,具體 類型及相關(guān)構(gòu)件信息見表 2。
2602 5
擺渡人張 ??? 2年前
Adams 多體動力學:工業(yè)仿真的黃金標準與未來引擎
o Adams/Controls:機電一體化耦合模塊,與 MATLAB/Simulink 無縫對接,實現(xiàn)機械系統(tǒng)與控制系統(tǒng)聯(lián)合仿真。3. 核心技術(shù)原理基于拉格朗日方程與牛頓 - 歐拉方程,采用變步長剛性積分算法 + 稀疏矩陣技術(shù),高效求解大規(guī)模非線性動力學方程;支持剛?cè)狁詈稀⒎蔷€性接觸、摩擦、疲勞、振動等多物理場耦合分析,兼顧計算精度與效率。二、核心優(yōu)勢1.
896
庭田科技 ??? 5天前
基于ADAMS的點按手法運動仿真 
機器人手臂的正、逆運動學計算是比較復雜的,可以借助MATLAB進行計算。1.4 在ADAMS定義相關(guān)參數(shù)在ADAMS環(huán)境下,首先定義各個部件的質(zhì)量屬性,然后定義模型各種約束,為仿真做準備。
3012 2
擺渡人張 ??? 2年前
解讀背后的建模和仿真技術(shù) 
Adams和Matlab的聯(lián)合仿真可實現(xiàn)這一過程。整個過程中Adams虛擬樣機作為被控制對象,需要從Matlab中獲得驅(qū)動數(shù)據(jù)。Matlab則需要虛擬樣機的實現(xiàn)狀態(tài)來調(diào)整控制程序。在相同的關(guān)節(jié)輸出力矩的情況下,腿的質(zhì)量/轉(zhuǎn)動慣量越小,則被控響應(yīng)速度越快。機器人在從高處下落這種情況時,腿著地瞬間,關(guān)節(jié)速度瞬間突變。如機器人腿的轉(zhuǎn)動慣量過大,將會給腿連桿產(chǎn)生較大的沖擊力矩,而損壞腿或足。
2920
深圳北鯤云計算有限公司 ??? 3年前
基于DeltaD打印機的剛?cè)狁詈线\動學分析 
由圖10可知,在主動臂和從動臂進行柔性處理的情況下,其仿真結(jié)果和剛性體仿真結(jié)果基本重合,在誤差允許的范圍內(nèi),進一步驗證了設(shè)計的合理性.4 結(jié)語本文對Delta打印機的工作原理和結(jié)構(gòu)進行了說明,并結(jié)合其工作原理,完后了三維模型的繪制.結(jié)合其結(jié)構(gòu)特點,利用薩哈GDH坐標法,建立其運動學方程,同時借助Matlab和Adams軟件驗證其數(shù)學模型的合理性,利用Hypermesh對Delta
4400 3
擺渡人張 ??? 2年前
《虛擬世界的力學交響曲:Adams如何重塑工業(yè)仿真邊界》
故障預演劇場通過引入失效物理模型,Adams將傳統(tǒng)仿真提升為"故障編劇"。當用戶設(shè)定液壓油管微裂紋參數(shù)后,系統(tǒng)會自動推演出三個月后密封失效引發(fā)的連鎖反應(yīng)——這是物理測試永遠無法捕捉的"未來記憶"。3. 跨維度控制器共舞突破性的控制-機械協(xié)同仿真接口,讓MATLAB的控制算法與Adams的機械模型實現(xiàn)毫秒級數(shù)據(jù)交換。
2266
庭田科技 ??? 11月前
案例 | 沃爾沃汽車公司使用Adams進行耐久性道路載荷仿真的新方法 
此外,Adams支持使用植入文件在FMI框架之外進行聯(lián)合仿真。Adans與Matlab聯(lián)合仿真過程中,可以將Adams作為植入模型,這種方法需要Adams Control模塊,生成.m文件和.acf文件。求解器通過存儲通道或TCP/IP接收并執(zhí)行命令,來運行仿真并傳達車輛狀態(tài)。 此工作流程存在一些限制,即使是開放標準(例如FMI)也無法解決。
4349 2
Cruise ??? 3年前
設(shè)計仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
動力傳動系模型 Adams與AMESim FMI聯(lián)合仿真 Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。
2429
海克斯康設(shè)計與仿真 ??? 3年前
Adams多體動力學仿真解決方案全面解析
提供多物理場協(xié)同仿真接口:- 控制系統(tǒng):與MATLAB/Simulink無縫集成- 液壓系統(tǒng):支持與AMESim聯(lián)合仿真- 有限元分析:導出載荷邊界條件供Nastran等軟件使用 四、行業(yè)解決方案 4.1 汽車工程應(yīng)用整車開發(fā)全流程支持:1.
3052
庭田科技 ??? 1年前
Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
FMI可用于模型交換或協(xié)同仿真。 Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。
2619
Cruise ??? 3年前
設(shè)計仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟性和NVH性能 
動力傳動系模型 Adams與AMESim FMI聯(lián)合仿真 Adams FMI支持將Matlab或Easy5的Adams控制聯(lián)合仿真擴展到所有使用FMI聯(lián)合仿真標準的軟件。
4199 1
萬有引力LYQ ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
